Many-objective
Throughout this section, we will solve the three-objective problem DTLZ2 imported from pymoo.
The definition of “many-objective” differs according to the refence used. Some issues arise in maintaining population diversity in the survival stage for problems with more than two objectives. Therefore we will consider here “many-objective problems those with more than two objectives.
For more details about the algorithms used, please refer to the Algorithms section.
[1]:
import matplotlib.pyplot as plt
from pymoo.optimize import minimize
from pymoode.algorithms import NSDER
from pymoode.algorithms import GDE3
from pymoode.survival import RankAndCrowding
from pymoo.util.ref_dirs import get_reference_directions
DTLZ2
[2]:
from pymoo.problems import get_problem
problem = get_problem("dtlz2")
[3]:
NGEN = 150
POPSIZE = 136
SEED = 5
GDE3-MNN
Let us instantiate a GDE3 algorithm and pass as the survival operator RankAndCrowding(crowding_func="mnn"), which is suitable for problems with more than two objectives. Alternatively, one could have directly imported the GDE3MNN algorithm.
from pymoode.algorithms import GDE3MNN
[4]:
gde3 = GDE3(
pop_size=POPSIZE, variant="DE/rand/1/bin", CR=0.2, F=(0.0, 1.0), gamma=1e-4,
survival=RankAndCrowding(crowding_func="mnn"),
)
res_gde3 = minimize(
problem,
gde3,
('n_gen', NGEN),
seed=SEED,
save_history=False,
verbose=False,
)
[5]:
fig, ax = plt.subplots(figsize=[6, 5], dpi=70, subplot_kw={'projection':'3d'})
ax.scatter(problem.pareto_front()[:, 0], problem.pareto_front()[:, 1], problem.pareto_front()[:, 2],
color="firebrick", label="True Front", marker="o")
ax.scatter(res_gde3.F[:, 0], res_gde3.F[:, 1], res_gde3.F[:, 2],
color="navy", label="GDE3-MNN", marker="o")
ax.view_init(elev=30, azim=30)
ax.set_xlabel("$f_1$")
ax.set_ylabel("$f_2$")
ax.set_zlabel("$f_3$")
ax.legend()
fig.tight_layout()

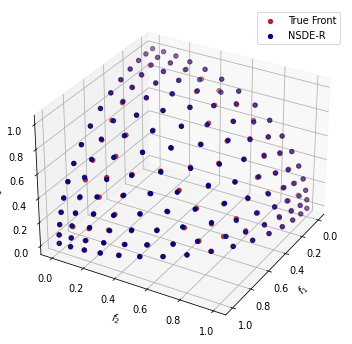
NSDE-R
Let us now instantiate the NSDE-R algorithm, which uses DE reproduction operators with the survival strategy of NSGA-III.
[6]:
ref_dirs = get_reference_directions("das-dennis", 3, n_partitions=15)
nsder = NSDER(ref_dirs=ref_dirs, pop_size=POPSIZE,
variant="DE/rand/1/bin", CR=0.5, F=(0.0, 1.0), gamma=1e-4,
)
res_nsder = minimize(
problem,
nsder,
('n_gen', NGEN),
seed=SEED,
save_history=False,
verbose=False,
)
[7]:
fig, ax = plt.subplots(figsize=[6, 5], dpi=70, subplot_kw={'projection':'3d'})
ax.scatter(problem.pareto_front()[:, 0], problem.pareto_front()[:, 1], problem.pareto_front()[:, 2],
color="firebrick", label="True Front", marker="o")
ax.scatter(res_nsder.F[:, 0], res_nsder.F[:, 1], res_nsder.F[:, 2],
color="navy", label="NSDE-R", marker="o")
ax.view_init(elev=30, azim=30)
ax.set_xlabel("$f_1$")
ax.set_ylabel("$f_2$")
ax.set_zlabel("$f_3$")
ax.legend()
fig.tight_layout()
[ ]: