Multi-objective
Throughout this section, we will solve the two-objective problem ZDT1 imported from pymoo.
For more details about the algorithms used, please refer to the Algorithms section.
ZDT1
Consider \(n=30\).
[1]:
import matplotlib.pyplot as plt
from pymoo.optimize import minimize
from pymoo.problems import get_problem
from pymoo.indicators.igd import IGD
from pymoode.algorithms import GDE3, NSDE
from pymoode.survival import RankAndCrowding
from pymoode.performance import SpacingIndicator
[2]:
problem = get_problem("zdt1")
pf = problem.pareto_front()
[3]:
NGEN = 250
POPSIZE = 100
SEED = 5
GDE3
Let us instantiate a GDE3 algorithm and pass as the default survival operator RankAndCrowding(crowding_func="cd"), which is suitable for problems with two objectives.
[4]:
gde3 = GDE3(
pop_size=POPSIZE, variant="DE/rand/1/bin", CR=0.5, F=(0.0, 0.9), de_repair="bounce-back",
survival=RankAndCrowding(crowding_func="cd"),
)
res_gde3 = minimize(
problem,
gde3,
('n_gen', NGEN),
seed=SEED,
save_history=False,
verbose=False,
)
[5]:
fig, ax = plt.subplots(figsize=[6, 5], dpi=70)
ax.scatter(pf[:, 0], pf[:, 1], color="navy", label="True Front")
ax.scatter(res_gde3.F[:, 0], res_gde3.F[:, 1], color="firebrick", label="GDE3")
ax.set_ylabel("$f_2$")
ax.set_xlabel("$f_1$")
ax.legend()
fig.tight_layout()
plt.show()

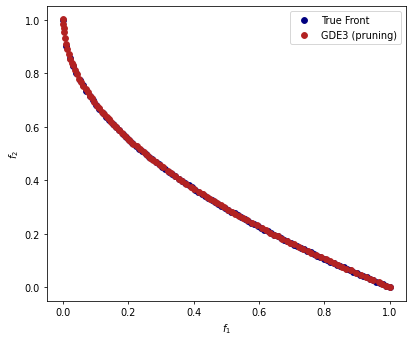
Let us instantiate a GDE3 algorithm and pass as the improved survival operator RankAndCrowding(crowding_func="pcd"), which recursively re-calculates crowding distances as removes individuals from the population. Alternatively, one could have directly imported the GDE3P algorithm.
from pymoode.algorithms import GDE3P
[6]:
gde3p = GDE3(
pop_size=POPSIZE, variant="DE/rand/1/bin", CR=0.5, F=(0.0, 0.9), de_repair="bounce-back",
survival=RankAndCrowding(crowding_func="pcd"),
)
res_gde3p = minimize(
problem,
gde3p,
('n_gen', NGEN),
seed=SEED,
save_history=False,
verbose=False,
)
[7]:
fig, ax = plt.subplots(figsize=[6, 5], dpi=70)
ax.scatter(pf[:, 0], pf[:, 1], color="navy", label="True Front")
ax.scatter(res_gde3p.F[:, 0], res_gde3p.F[:, 1], color="firebrick", label="GDE3 (pruning)")
ax.set_ylabel("$f_2$")
ax.set_xlabel("$f_1$")
ax.legend()
fig.tight_layout()
plt.show()
NSDE
Now let us adopt the NSDE algorithm. It is very similar to GDE3, however, adopting a pure \((\mu + \lambda)\) survival strategy, which might lead to premature convergence in some problems of the ZDT test suite.
[8]:
nsde = NSDE(
pop_size=POPSIZE, variant="DE/rand/1/bin", CR=0.5, F=(0.0, 0.9), de_repair="bounce-back",
survival=RankAndCrowding(crowding_func="pcd"),
)
res_nsde = minimize(
problem,
nsde,
('n_gen', NGEN),
seed=SEED,
save_history=False,
verbose=False,
)
[9]:
fig, ax = plt.subplots(figsize=[6, 5], dpi=70)
ax.scatter(pf[:, 0], pf[:, 1], color="navy", label="True Front")
ax.scatter(res_nsde.F[:, 0], res_nsde.F[:, 1], color="firebrick", label="NSDE")
ax.set_ylabel("$f_2$")
ax.set_xlabel("$f_1$")
ax.legend()
fig.tight_layout()
plt.show()

But it worked very well in this example.
Spacing
The spacing indicator is a quantitative metric of how good is the distribution of elements in the pareto front. It is described in more detail in the complete tutorial. One can also refer to [12] for more details.
[10]:
sp = SpacingIndicator(pf=problem.pareto_front(), zero_to_one=True)
The lesser the spacing, the more even the distribution of elements
[11]:
print("Spacing of GDE3 with normal crowding distances: ", sp.do(res_gde3.F))
print("Spacing of GDE3 with pruning nds crowding distances: ", sp.do(res_gde3p.F))
print("Spacing of NSDE with pruning nds crowding distances: ", sp.do(res_nsde.F))
Spacing of GDE3 with normal crowding distances: 0.00671798902242222
Spacing of GDE3 with pruning nds crowding distances: 0.0026884699308083585
Spacing of NSDE with pruning nds crowding distances: 0.002587892035294526
[12]:
igd = IGD(pf=problem.pareto_front(), zero_to_one=True)
[13]:
print("IGD of GDE3 with normal crowding distances: ", igd.do(res_gde3.F))
print("IGD of GDE3 with pruning nds crowding distances: ", igd.do(res_gde3p.F))
print("IGD of NSDE with pruning nds crowding distances: ", igd.do(res_nsde.F))
IGD of GDE3 with normal crowding distances: 0.004552975587711302
IGD of GDE3 with pruning nds crowding distances: 0.0038818313760975985
IGD of NSDE with pruning nds crowding distances: 0.0039248610073845105